


Tính năng, đặc điểm:
Siêu nhỏ gọn và siêu nhẹ
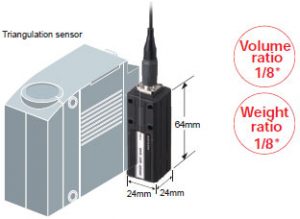
Tận dụng không gian hẹp trong máy
Đầu cảm biến 24 × 24 mm phù hợp dễ dàng với bất kỳ máy nào.
Tính năng, đặc điểm:
Siêu nhỏ gọn và siêu nhẹ
Tận dụng không gian hẹp trong máy
Đầu cảm biến 24 × 24 mm phù hợp dễ dàng với bất kỳ máy nào.
* So sánh nội bộ.
Khu vực lắp ghép Giảm xuống 1/7 *
* So sánh nội bộ.
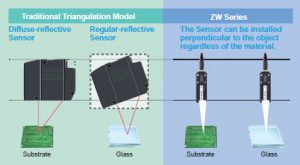
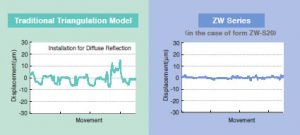
Với triangulation truyền thống, nó là cần thiết để sử dụng hoặc phản xạ khuếch tán hoặc phản ánh thường xuyên tùy thuộc vào vật liệu. Tuy nhiên, nguyên tắc chung được sử dụng cho dòng ZW loại bỏ sự cần thiết phải thay đổi cài đặt cảm biến ngay cả khi vật liệu thay đổi.
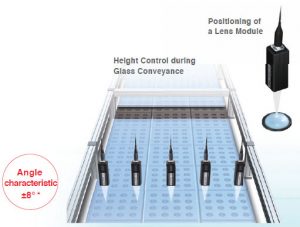
Kiểm soát chiều cao của vòi phun
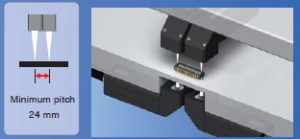
Cài đặt trong không gian chật hẹp
Các hạn chế về không gian, tạo nhiệt và can thiệp lẫn nhau thường ngăn cản việc lắp đặt song song nhiều cảm biến tam giác truyền thống. Đầu cảm biến ZW-series nhỏ gọn, không tạo nhiệt loại bỏ những vấn đề này. Hơn nữa, đầu cảm biến loại góc bên phải có thể được lắp đặt trong một không gian giới hạn trên phôi gia công mà không cần gương xoay.
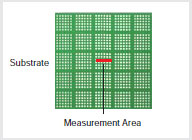
Các cảm biến truyền thống thường đo độ dày của phôi bằng cách tính toán sự khác biệt giữa chiều cao của sân khấu và bề mặt trên cùng của phôi gia công. Đầu cảm biến loạt ZW có thể được lắp đặt trong không gian nhỏ phía dưới để đo trực tiếp chiều cao từ bề mặt trên và dưới của phôi gia công, cho phép kiểm tra độ dày chính xác hơn.
Kiểm tra độ dày của các bộ phận điện tử nhỏ
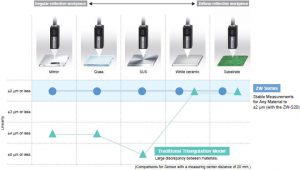
Các phép đo ổn định cho bất kỳ vật liệu nào có đặc tính góc cao
Các phép đo ổn định từ cùng vị trí lắp đặt ngay cả đối với các vật liệu khác nhau
Không cần phải thay đổi hoặc điều chỉnh Bộ cảm biến cho từng vật liệu. Ngay cả khi vật liệu thay đổi, bạn vẫn có thể tiếp tục đạt được các phép đo ổn định với cùng một cảm biến từ cùng vị trí lắp đặt.
Độ tuyến tính cho các vật liệu khác nhau
Các phép đo ổn định trên các ranh giới giữa các vật liệu
(Tất cả các biểu đồ đo lường đại diện cho các ví dụ điển hình.)
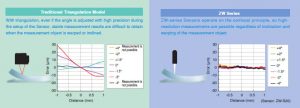
Đặc trưng
Khi đo một vật có bề mặt giống như gương với hình tam giác, hiệu năng sẽ giảm đáng kể tùy thuộc vào góc của cảm biến.
Khi nhiều cảm biến được sử dụng để kiểm soát độ cao trong quá trình vận chuyển kính, các góc của các cảm biến phải được điều chỉnh với độ chính xác cao trong khi thiết lập. Dòng cảm biến ZW tập trung cho phép đo độ phân giải cao mà không cần điều chỉnh góc nghiêm ngặt. Điều này dẫn đến việc giảm chi phí và không gian cho việc điều chỉnh khuôn và thời gian điều chỉnh.
* Đây không phải là giá trị được đảm bảo. Tham khảo Dữ liệu đặc trưng (Catalogue) cho các ví dụ điển hình.
Cấu trúc đầu cảm biến mạnh mẽ
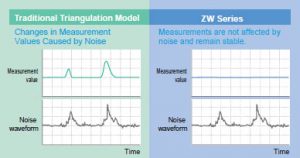
Không có tiếng ồn (Giảm công việc cho các biện pháp đối phó EMC)
Không bị ảnh hưởng bởi tiếng ồn
Để đảm bảo các phép đo có độ phân giải cao với các cảm biến thông thường, các biện pháp đối phó phải được thực hiện để bảo vệ cảm biến khỏi nhiễu điện từ được phát ra bởi bất kỳ thiết bị lân cận nào các phần. Ngoài ra, cáp quang kết nối đầu cảm biến với bộ điều khiển có thể được đặt gần đường dây điện và các cáp khác phát ra nhiễu mà không ảnh hưởng đến hoạt động.
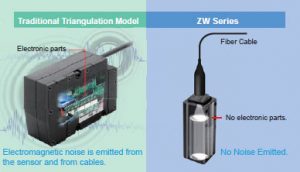
Không phát xạ tiếng ồn
Không có bộ phận điện tử nào được sử dụng trong đầu cảm biến dòng ZW hoặc cáp quang, vì vậy chúng không phát ra nhiễu điện từ. Do đó, bạn có thể sử dụng chúng một cách đáng tin cậy cùng với các thiết bị khác.
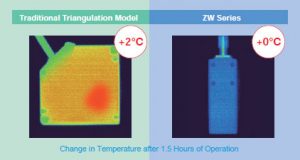
Trong điều khiển máy có độ phân giải cao, nhiệt do đầu cảm biến tạo ra có thể ảnh hưởng xấu đến thiết bị gần đó và khiến lỗi tăng lên. Tuy nhiên, Đầu cảm biến sê-ri ZW không sinh nhiệt và do đó không ảnh hưởng đến thiết bị gần đó. Bạn cũng có thể cài đặt nhiều Đầu cảm biến cạnh nhau mà vẫn chắc chắn hoạt động đáng tin cậy.
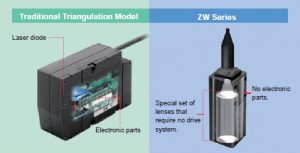
Cảm biến dịch chuyển thường được cài đặt trong các ứng dụng di chuyển và các cài đặt khác có thể bị rung. Điều quan trọng là họ có thẻ chịu được loại yêu cầu này. Đầu cảm biến sê-ri ZW được thiết kế cho loại môi trường này, chúng không có bộ phận điện tử hoặc PCB mà cảm biến tam giác tiêu chuẩn chứa. Việc giảm các bộ phận đối với ống kính và cáp quang làm giảm các yêu cầu bảo trì và nguồn sáng LED cũng loại bỏ các biện pháp an toàn tiêu chuẩn cần thiết cho laser.
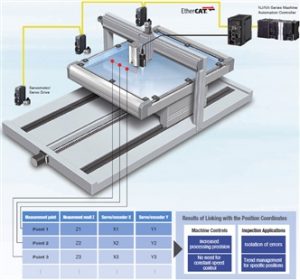
Mạng mở tốc độ cao EtherCAT đã được tối ưu hóa để điều khiển máy. Cảm biến sê-ri ZW là Cảm biến dịch chuyển Omron đầu tiên mà EtherCAT cung cấp thiết kế hiệu quả cao cho các ứng dụng điều khiển máy có độ chính xác cao sử dụng kết quả đo để kiểm soát hoạt động của máy.
EtherCAT có thể sử dụng để kết nối với các ổ đĩa servo hoặc đầu vào bộ mã hóa để nhanh chóng có được tọa độ vị trí và chuyển vị ZW. Thông tin về chiều cao và tọa độ vị trí XY có thể được liên kết dễ dàng để các ứng dụng điều khiển máy có thể tăng độ chính xác xử lý theo chiều cao và các ứng dụng kiểm tra được hưởng lợi từ bảo trì, chẳng hạn như giúp cách ly lỗi hoặc thực hiện phân tích xu hướng
Thông Số Kĩ Thuật:
| Mục | ZW-S07 | ZW-S20 | ZW-S30 | ZW-S40 | ZW-SR07 | ZW-SR20 | ZW-SR40 | |
|---|---|---|---|---|---|---|---|---|
| Đo khoảng cách trung tâm |
7 mm | 20 mm | 30 mm | 40 mm | 7 mm | 20 mm | 40 mm | |
| Phạm vi đo | ± 0,3 mm | ± 1 mm | ± 3 mm | ± 6 mm | ± 0,3 mm | ± 1 mm | ± 6 mm | |
| Độ phân giải tĩnh * 1 | 0,25 μm | 0,25 μm | 0,25 μm | 0,25 μm | 0,25 μm | 0,25 μm | 0,25 μm | |
| Tuyến tính * 2 | ± 0,8 μm | ± 1,2 μm | ± 4,5 μm | ± 7,0 μm | ± 1,1 μm | ± 1,6 μm | ± 9,3 μm | |
| Đường kính điểm * 3 |
Ở gần | 20 dặm .m. | 45 μm dia. | 70 μm dia. | 90 μm dia. | 20 dặm .m. | 45 μm dia. | 90 μm dia. |
| Trung tâm | 18 μm dia. | 40 μm dia. | 60 μm dia. | 80 μm dia | 18 μm dia. | 40 μm dia. | 80 μm dia | |
| Xa | 20 dặm .m. | 45 μm dia. | 70 μm dia. | 90 μm dia | 20 dặm .m. | 45 μm dia. | 90 μm dia | |
| Chu kỳ đo | 500 μ đến 10 mili giây | |||||||
| Bộ điều khiển cảm biến áp dụng |
ZW-C1 [] [] [] / – CE1 [] [] | |||||||
| Chiếu sáng môi trường xung quanh |
Chiếu sáng trên bề mặt vật thể 10.000 lx hoặc ít hơn: ánh sáng nóng sáng | |||||||
Phạm vi nhiệt độ môi trường xung quanh |
Hoạt động: 0 đến 50 ° C, Bảo quản: -15 đến 60 ° C (không có đóng băng hoặc ngưng tụ) |
|||||||
| Độ ẩm môi trường xung quanh | Vận hành và bảo quản: 35% đến 85% (không ngưng tụ) | |||||||
| Mức độ bảo vệ | IP40 (IEC60529) | |||||||
| Khả năng chống rung (phá hoại) |
10 đến 150 Hz, biên độ đơn 0,35 mm, mỗi phút 80 phút theo hướng X, Y và Z | |||||||
| Khả năng chống sốc (phá hoại) |
150 m / s 2 3 lần mỗi lần theo sáu hướng (lên / xuống, trái / phải, tiến / lùi) | |||||||
Đặc tính nhiệt độ * 4 |
0,6 μm / ° C | 1,5 μm / ° C | 2,8 μm / ° C | 4,8 μm / ° C | 0,6 μm / ° C | 1,5 μm / ° C | 4,8 μm / ° C | |
| Nguyên vật liệu | Trường hợp: nhôm chết đúc sợi cáp sheat: PVC Calibration ROM: PC |
|||||||
| Chiều dài cáp quang | 0,3 m, 2 m (cáp chịu lực) | |||||||
Bán kính uốn tối thiểu cáp quang |
20 mm | |||||||
| Cách điện kháng (Calibration ROM) |
Giữa trường hợp và tất cả các thiết bị đầu cuối: 20 MΩ (250 V megger) | |||||||
| Độ bền điện môi (ROM hiệu chỉnh) |
Giữa trường hợp và tất cả các thiết bị đầu cuối: 1.000 VAC, 50/60 Hz, 1 phút | |||||||
| Cân nặng | Xấp xỉ. 105 g (Khung gầm, cáp quang) | |||||||
| Phụ kiện đi kèm với đầu cảm biến |
Sửa vít (M2) cho ROM hiệu chuẩn, Dây đeo × 1, Tờ hướng dẫn, Các biện pháp phòng ngừa để sử dụng chính xác | |||||||

Cảm Biến

Cảm Biến

Cảm Biến

Cảm Biến

Cảm Biến